34 pitch yaw roll diagram
1 Principal axes. 1.1 Vertical axis (yaw); 1.2 Transverse axis (pitch); 1.3 Longitudinal axis (roll) · 2 Relationship with other systems of axes · 3 History; 4 ...Principal axes · Vertical axis (yaw) · Longitudinal axis (roll)
Pitch, Roll and Yaw: The Three Axes of Rotation. In this activity (page 87 of the PDF), learners move their bodies to better understand the three axes of rotation: pitch, roll and yaw. This exercise will help learners understand how the visual and vestibular systems work with the hippocampus to determine location and direction.
Pitch Roll Rudder Thrust Weight Yaw. Objective: In this activity, students will learn the abilities of technological design as they identify . the various parts of the airplane and gain a basic understanding of their functions. Activity Overview: Students will label the aircraft’s control surfaces, learning the purpose or function of . each component in the process. Activity: 1. …

Pitch yaw roll diagram
13.12.2021 · Vehicle roll angle ϕ, roll rate ω x, pitch angle θ, pitch rate ω y, yaw rate ω z of C.G. and wheel angular velocity of each wheel ω i are all easy to measure with various sensors. In addition, the tyre cornering stiffness change, tyre vertical stiffness change and rolling resistance change after tyre blow-out are all assumed to be known.
roll-pitch-yaw-diagram ... High Sierra Pilots is a flying club at the Minden-Tahoe Airport (KMEV) and Carson City Airport (KCXP). Our passion for General Aviation ...
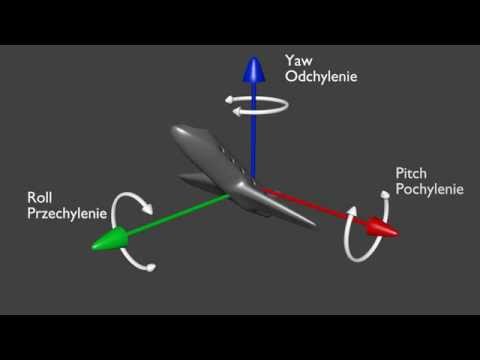
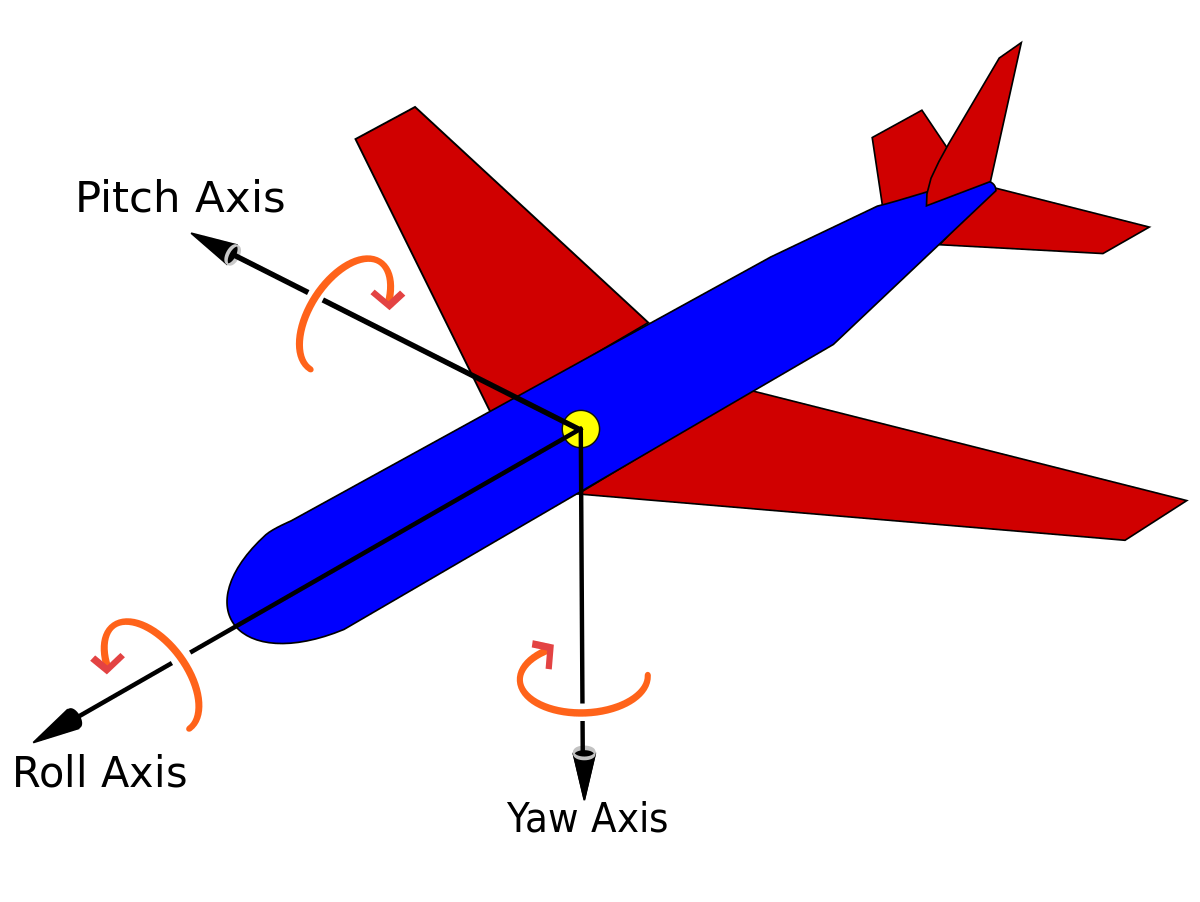
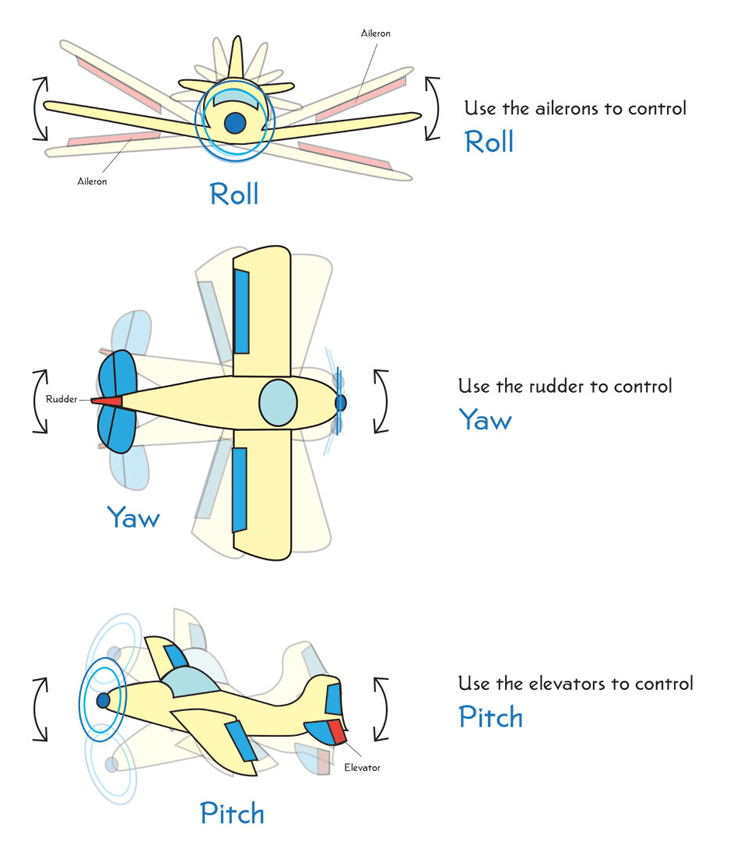
What are Roll, Pitch, and Yaw? Imagine three lines running through an airplane and intersecting at right angles at the airplane’s center of gravity. Rotation around the front-to-back axis is called roll. Rotation around the side-to-side axis is called pitch. Rotation around the vertical axis is called yaw. Roll The Ailerons Control Roll Yaw
Pitch yaw roll diagram.
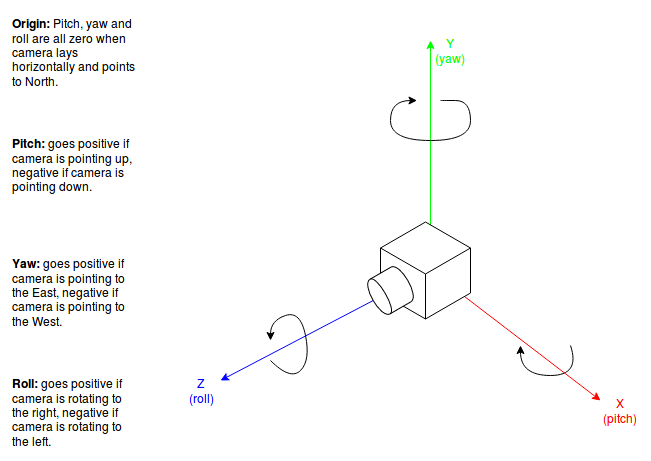
The yaw (direction), pitch (tilt) and roll values for the camera, plane and objects are defined as described in the following diagram. ... Range from 0 to 360 ...
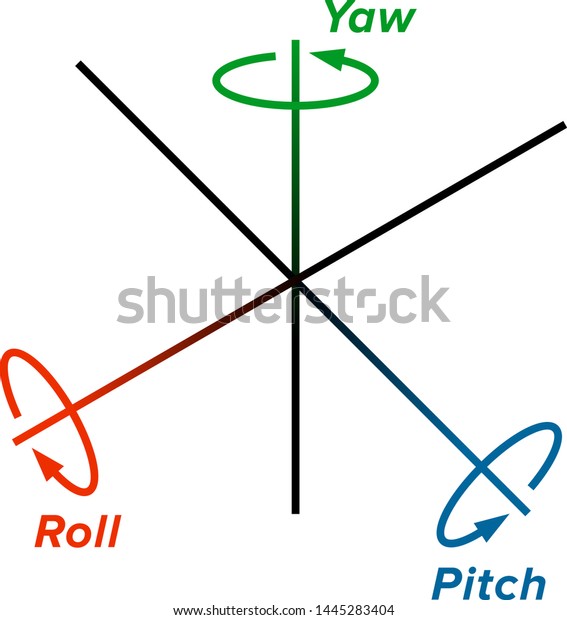
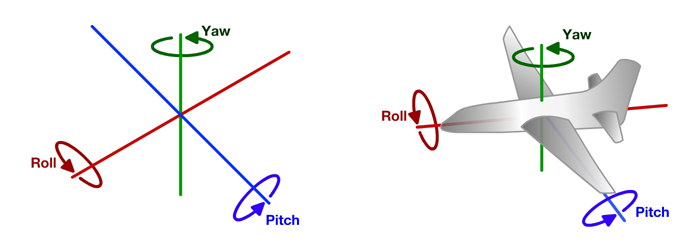
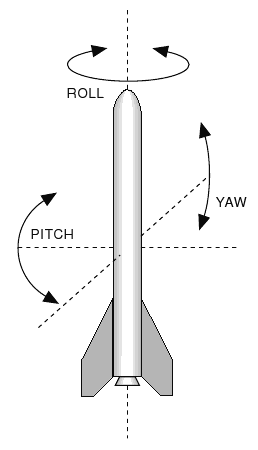
Pitch, yaw and roll are the three dimensions of movement when an object moves through a medium.. The terms may be used to describe an aeroplane's movements through the air. They are also applied to fish moving through water, and spacecraft moving through space.. There are in fact six degrees of freedom of a rigid body moving in three-dimensional space.
Like roll, yaw is the product of a sudden side-to-side weight shift caused by sharp steering. Yaw is more likely to occur on slippery surfaces when both rear tires have poor traction, causing the back end of the vehicle to spin away from the direction of the turn rather than lifting off the ground sideways.
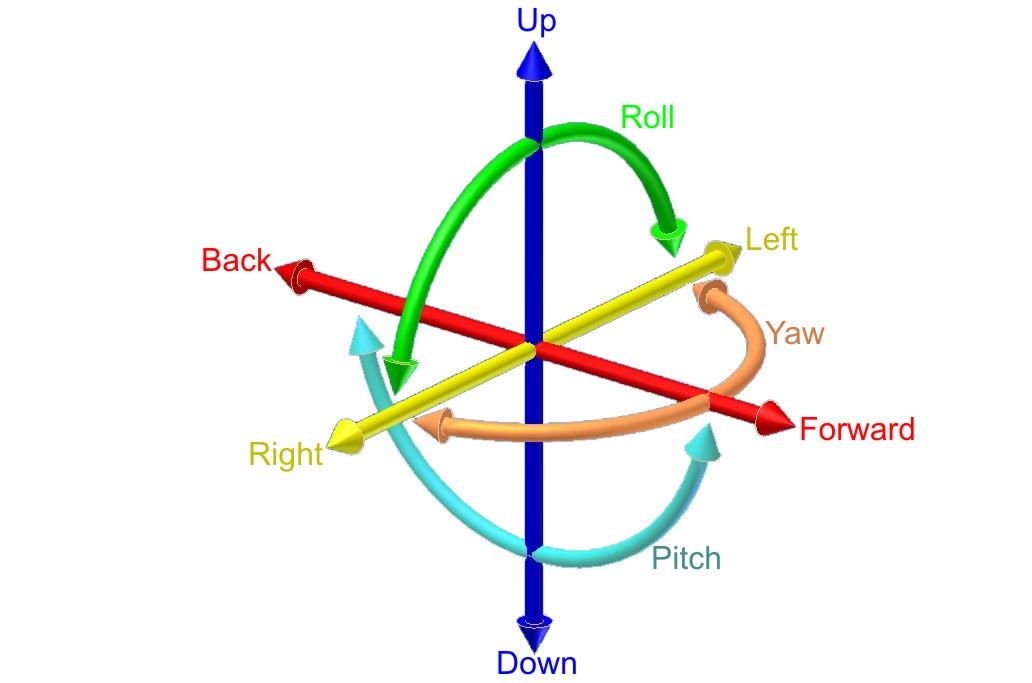
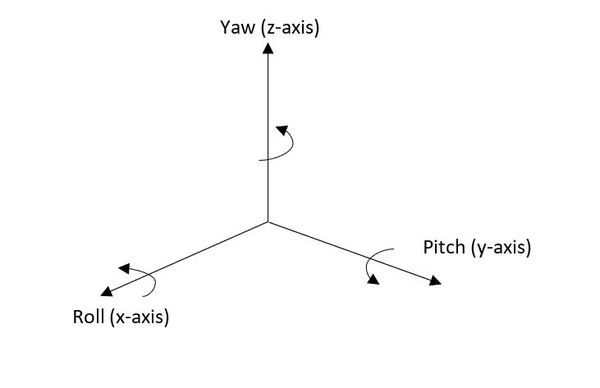
Yaw – rotation along the Z axis. Pitch -rotation along the Y axis. Roll – rotation along the X axis. Z-UP 3D apps include Blender, Carrara, Unreal Engine and Unity. Let me know any others and I’ll add them here. Y-Up 3D apps include DAZ Studio, Maya, 3DS Max, Modo and Lightwave. For those apps, swap Yaw and Pitch in the table above.
set_roll(), set_pitch(), set_yaw(): accepts roll, pitch and yaw values in the range of -4500 ~ 4500. These are not desired angles or even rates but rather just a value. For example set_roll(-4500) would mean roll left as fast as possible. set_throttle() : accepts an absolute throttle value in the range of 0 ~ 1000. 0 = motors off, 1000 = full ...
pitch 1 (pĭch) n. 1. Any of various thick, dark, sticky substances obtained from the distillation residue of coal tar, wood tar, or petroleum and used for waterproofing, roofing, caulking, and paving. 2. Any of various natural bitumens, such as mineral pitch or asphalt. 3. A resin derived from the sap of various coniferous trees, as the pines. tr.v ...
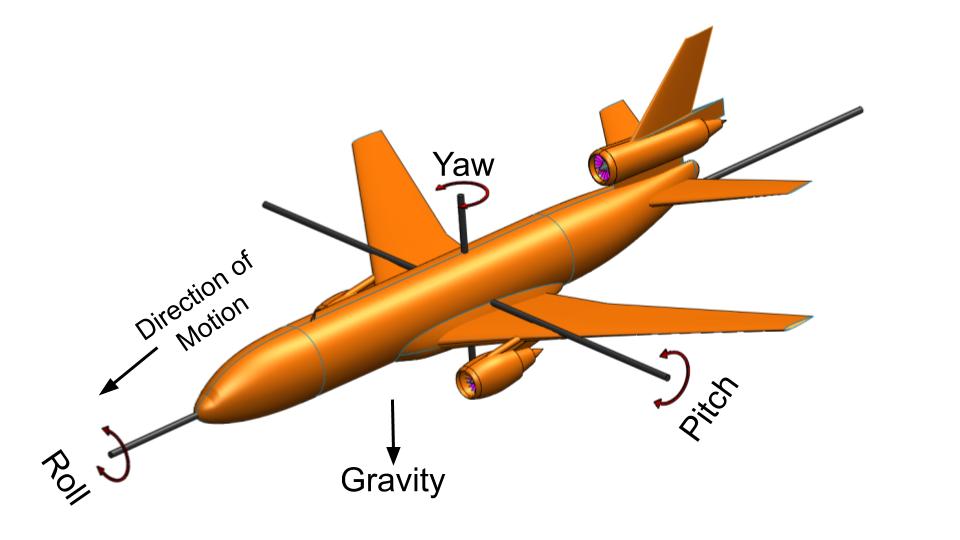
Yaw, Pitch and Roll in an aircraft. Yaw motion in an aircraft. Mnemonics to remember angle names . A yaw rotation is a movement around the yaw axis of a rigid body that changes the direction it is pointing, to the left or right of its direction of motion. The yaw rate or yaw velocity of a car, aircraft, projectile or other rigid body is the angular velocity of this rotation, or rate of …
A yaw will obtain the bearing, a pitch will yield the elevation and a roll gives the bank angle. Therefore, in aerospace they are sometimes called yaw, pitch and roll. Notice that this will not work if the rotations are applied in any other order or if the airplane axes start in any position non-equivalent to the reference frame.
This post is intended to explain in more details what the heck are those very complicated terms for non-engineering people like me. :-) PITCH: The angle of the vehicle up or down. Imagine when you go up a hill or down a hill. Affects both cars and planes in similar ways. ROLL: The angle of the vehicle side to side vs the horizon. Imagine when you are in a banked curve.
29.12.2020 · Circuit Diagram for Measuring Pitch, Roll, and Yaw. MPU6050 Gyro/Accelerometer is an I2C Module. So we just need 4 wires to interface it with Arduino. Just hook the SCL and SDA pin of MPU6050 to the A5 and A4 pin of Arduino respectively. As always, connect VCC to 5V and GND to GND. As already mentioned you don’t need OLED Display to test this project. But, if …
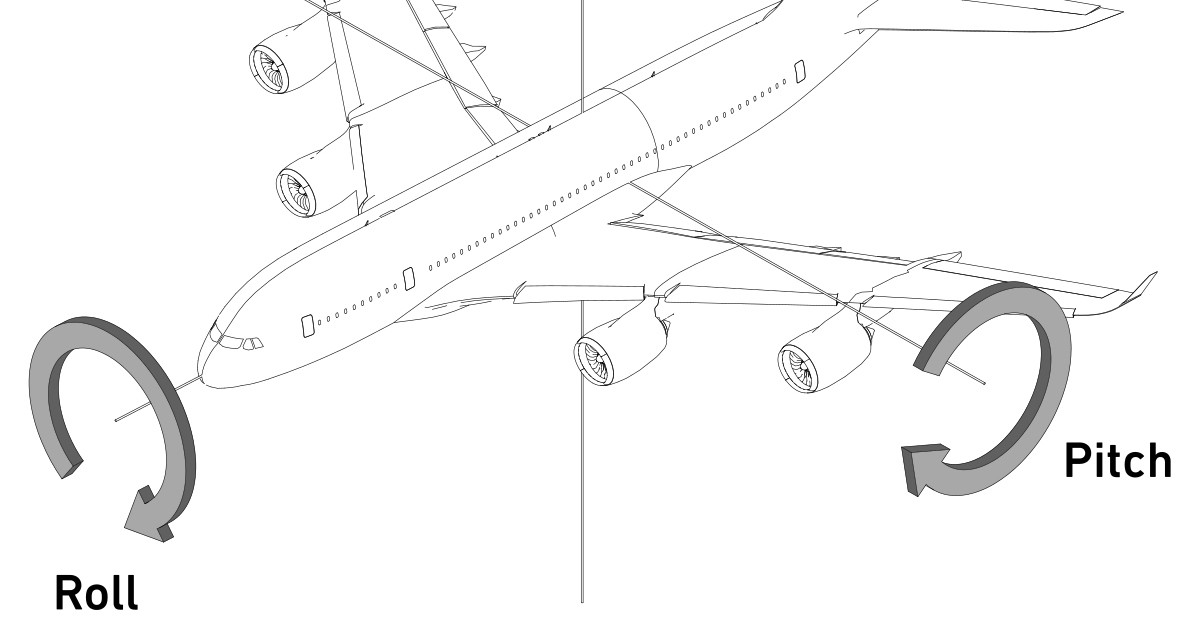
Pitch, Roll and Yaw, which are also known as the “Principal Axes” or “Axes of Rotation”, cover the following; Lateral Axis (Pitch) Longitudinal Axis (Roll) Vertical Axis (Yaw). When an aircraft is in flight, it is able to use these axes which run through its center of gravity and rotate in 3 dimensions which in turn will control its direction.
The yaw, pitch, and roll rotations can be used to place a 3D body in any orientation. A single rotation matrix can be formed by multiplying the yaw, pitch, and roll rotation matrices to obtain. ( 3. 42) It is important to note that performs the roll first, then the pitch, and finally the yaw.
Motion basics: how to define roll, pitch, and yaw for linear ...
13.05.2021 · This page shows the parts of an airplane and their functions. Airplanes are transportation devices which are designed to move people and cargo from one place to another. Airplanes come in many different shapes and sizes depending on the mission of the aircraft. The airplane shown on this slide is a turbine-powered airliner which has been chosen as a …

4: yaw, pitch and roll | download scientific diagram
To define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: X, Y, and Z. The two axes of the horizontal plane are typically defined as X and Y, with the X axis being in the direction of motion. The Y axis is orthogonal (perpendicular) to the direction of motion and is also in the horizontal plane.

5: explanation of roll, pitch and yaw movements of a ...
roll (rotation about the x-axis) pitch (rotation about the y-axis) yaw (rotation about the z-axis) Now, let’s say we have a 4-wheeled robot in space. The robot is moving in the +y direction as shown in the figure below. The robot turns slightly to the left, rotating around the z-axis. Rotation about the z-axis is yaw rotation.
Bagaimana cara merepresentasikan roll-pitch-yaw dalam hal ...

What's the difference between pitch, roll, and yaw? | machine ...
Roll, pitch, and yaw | how things fly

5: representation of the yaw, pitch and roll angles ...

File:pitch roll and yaw.svg - wikimedia commons
A new approach for measurement of pitch, roll and yaw angles ...
Roll pitch yaw three rotation angles stock vector (royalty ...
Airplane control - roll, pitch, yaw

5: yaw, pitch and roll of the tool | download scientific diagram
يعوض براءة الإختراع حانة yaw pitch roll order - ofogh-energy.com
What is the difference between roll pitch yaw: aircraft motions

Effects of roll and pitch components in retinal flow on ...
Aircraft principal axes - wikipedia

Pin on imu
Roll, pitch, and yaw | how things fly
يعوض براءة الإختراع حانة yaw pitch roll order - ofogh-energy.com
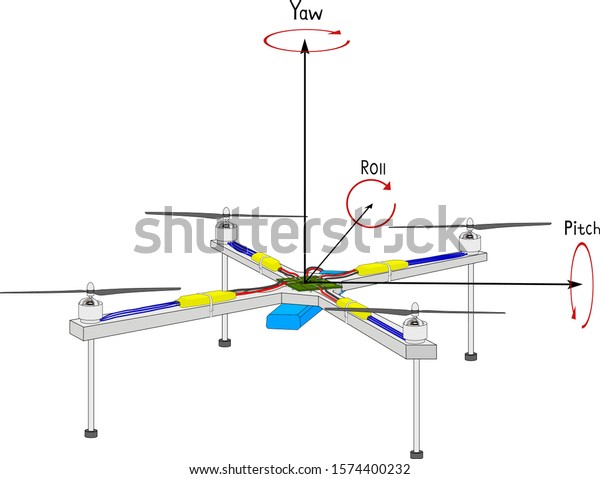
Yaw pitch roll quadcopter stock vector (royalty free) 1574400232

Average roll, pitch, and yaw angles. | download scientific ...

Kinect joint rotation - pitch yaw roll unity, hd png download ...
Motion basics: how to define roll, pitch, and yaw for linear ...
Yaw, pitch, roll | trek view

Camera yaw pitch roll, hd png download , transparent png ...

Pin on curt stuff

Axis rotations (pitch, yaw and roll) and translation ...
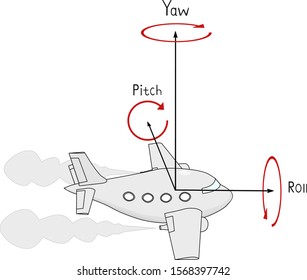
Yaw pitch roll aircraft stock vector (royalty free) 1568397742

Pitch, yaw, and roll - wikiwand
يعوض براءة الإختراع حانة yaw pitch roll order - ofogh-energy.com
Yaw, pitch, and roll diagrams using 2d coordinate systems ...
Pitch, roll and yaw — science learning hub
Yaw, pitch, and roll diagrams using 2d coordinate systems ...
0 Response to "34 pitch yaw roll diagram"
Post a Comment